Articles
اساس عملکرد حسگر توانسنج گرمایی
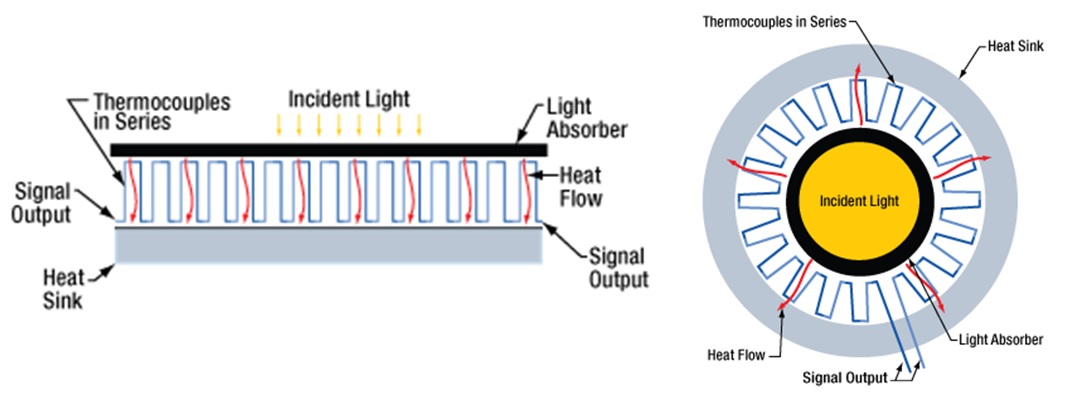
حسگرهای توانسنج گرمایی ترکیبی از ترموکوپلها بوده و از اصولی استفاده میکنند که برگرفته از اثر ترموالکتریک (بهعلاوه اثر سیبک) میباشد. بر این اساس، هر رسانایی که در معرض یک گرادیان گرمایی قرار داشته باشد، ولتاژی را تولید خواهد کرد. در نتیجه اگر یک اختلاف دمایی بین 2 سطح وجود داشته باشد، گرادیان دمایی باعث تولید یک اختلاف ولتاژ بین این دو سطح میشود. این فرایند را میتوان عکس اثر پلتیر در نظر گرفت.
Thermal sensor top view.
شکلهای بالا نمایی از حسگرهای گرمایی را نشان میدهد که در دو ساختار شعاعی و محوری طراحی شدهاند. سطح ورودی و یا بخش مرکزی حسگر یک ماده جاذب نور است که در ادامه آن ترموکوپلهای چندگانه قرار میگیرند. این ساختار حسگر میتواند بصورت سری و یا موازی طراحی شود.
خنکسازی
در حسگر توانسنج گرمایی، توان پرتوی لیزر فرودی، توسط سطح ورودی ترموپیل جذب شده و تبدیل به گرما میشود. گرما از جاذب عبور، در سراسر ترموکوپلها حرکت و به خنک کننده منتقل شده و در آنجا از بین میرود. این خنکسازی میتواند از طریق تکنیکهای هواخنک یا آبخنک انجام پذیرد. بهدلیل اینکه سطح دیگر ترموکوپلها، از لحاظ دمایی به خنک کننده حسگر متصل است، سرد باقی میماند. لذا گرادیان دمایی بین دو سطح بوجود میآید که به توان تابشی نور فرودی وابسته است. از اینرو ولتاژی بین سطوح گرم و سرد متناسب با توان فرودی بدست خواهد آمد. این ولتاژ با سری کردن ترموکوپلها با هم افزایش مییابد.
خنک کننده باید بهگونهای طراحی شود که در تماس مکانیکی مناسب و کافی با حلقه بیرونی ترموکوپلها قرارگیرد، بدون اینکه تماس حرارتی با جاذب نور یا حلقه درونی اتصالات ترموکوپل داشته باشد. همچنین مساحت پشت جاذب نباید در تماس حرارتی با هیچ چیز دیگری باشد چراکه جریان گرما باید از مسیر درنظرگرفته شده در راستای ترموکوپلها هدایت یابد.
مزیت ساختار ترموپیل شعاعی نسبت به ساختار خطی و محوری این است که سنسورها میتوانند برای اندازهگیری سطح توان تا کیلووات طراحی شوند. این حد بالا میتواند هم با افزایش ضخامت دیسک سنسور و هم با جابجایی ترموکوپلها از جاذب بدست آید، چرا که آنها را از قرارگیری در ناحیه برخورد لیزر محافظت میکند. معایب ترموکوپلهای شعاعی استفاده از یک سیستم خنکسازی با طراحی خاص است، که در هنگام سفارش برخی مدلها بوجود میآید. رزولوشن برای سنسورهای حرارتی شعاعی معمولا در محدوده 10 میلی وات میباشد.
در ساختار محوری ترموکوپلها بین دو صفحه تخت قرار میگیرند. یک صفحه جاذب نور و دیگری خنک کننده است. گرما به طور مستقیم از سطح جلویی به سمت عقب جریان مییابد، ابعاد این نوع طراحی میتواند فشرده شود و ابعاد سنسور میتواند تقریبا هماندازه منطقهی آشکارساز شود.
نسل جدید سنسورهای محوری طراحی شده رزولوشن کافی در محدوده میکرووات را داشته و سرعت پاسخ بسیار بالایی دارند. این سنسورها توانهای نوری تا چند وات را تشخیص میدهند که عمدتا توسط ضخامت مواد جاذب محدود میشوند.
برای زمانهایی که حسگرهای گرمایی در معرض پالسهای پر انرژی و کوتاه نانوثانیه قرار گیرند جذب کنندههای حجمی جایگزینهای مناسبی برای جاذبهای سطحی هستند. بر خلاف جاذبهای سطحی، که در نتیجه جذب انرژی پالس در یک ناحیه مشخص تخریب میشوند، جذب کنندههای حجمی گرما را از پالس نوری جمع کرده و در طول حجم آن را پخش میکنند. گرمای تولید شده در طول حجم در ترموکوپلها جاری شده و در خنک کننده پخش میشود.
تبدیل توان نوری به ولتاژ قابل اندازهگیری، به قابلیت سطح حسگر در جذب توان نوری و تبدیل آن به گرما بستگی دارد. بهمنظور افزایش میزان جذب، سطح حسگر لایهنشانی میشود. این لایه نشانی ترجیحا باید مستقل از طول موج بوده و آستانه تخریب آن نیز بالا باشد. (بعبارت دیگر بازده جذب مستقل از طول موج و قابلیت مقاومت در برابر توانهای بالای تابشی را داشتهباشد.)
وابستگی طول موج در حسگر گرمایی
ترموکوپلها اصولا به طولموج لیزر حساس نبوده و تنها گرما را به ولتاژ تبدیل میکنند. با اینحال لایهنشانی جاذب، میتواند به طول موج نور فرودی وابستگی داشته باشد؛ چرا که سطح لایه نشانی شده بخشی از پرتوی فرودی را بازتاب و مابقی را جذب میکند و میزان این بازتاب، کاملا وابسته به طولموج میباشد. از آنجایی که لایهنشانی شفاف نیست، لذا نوری را عبور نمیدهد و با تقریب بسیار خوبی کارایی فرایند تبدیل، تنها به عواملی مانند میزان بازتاب (R) و میزان جذب (A) وابسته است و این وابستگی با معادله \(R+A=1\) یا \(A=1-R\)، بیان میشود. درنتیجه میزان جذب بهعنوان تابعی از طول موج را میتوان با اندازهگیری میزان بازتاب در همان طول موج محاسبه کرد.
پاسخ طبیعی، ثابت زمانی حسگر و پیشبینیهای اندازهگیری توان
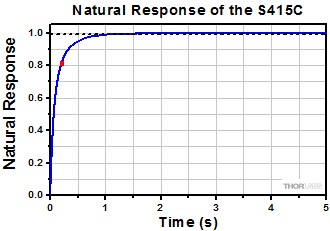
به انتقال آنی از تاریکی به روشنایی کامل حسگر، پاسخ طبیعی نوعی گویند. این تابع پلهای، پاسخی ایجاد میکند که میتواند با استفاده از یک تابع نمایشی مدلسازی شود (شکل زیر). (شبیه تابع توصیف جریان که در آن یک خازن شارژ میشود).
Natrual response.
ثابت زمانی حسگر، طول زمانی سپری شده پاسخ حسگر برای رسیدن به 99٪ حداکثر پاسخ آن تعریف میشود. هنگامی که سنسور به 99٪ حداکثر پاسخ آن رسیده باشد، طول زمانی برابر ثابت زمانی پنج سنسور، سپری شده است. در شکل بالا خط چین 99% حداکثر توان و نقطه قرمز رنگ پاسخ بعد از یک دوره ثابت زمانی حسگر میباشد.
هنگامی که مشخصه پاسخ طبیعی حسگر شناخته شود، بهخوبی میتوان از آن برای مدلسازی و پیشبینی قرائت توان نهایی، قبل از ثبات حسگر استفاده کرد.
هنگامی که پیشبینی حسگر فعال است، اولین پیشبینی بعد از سپری شدن زمانی مساوی با یک ثابت زمانی تک حسگر بدست میآید و این پیشبینی در فواصل زمانی ثابت زمانی هر سنسور آپدیت میشود تا لحظهای که طول زمان کل، به اندازه ثابت زمانی هفت سنسور سپری شود. پیشبینی پس از آن خاموش میشود. توان خوانده شده پس از هفت ثابت زمانی 99.9٪ قرائت نهایی است. در این پیشبینی عدم قطعیتی در رابطه با اندازهگیریها وجود دارد، که میتواند برخی از ریپلها را نشان دهند. حسگر سریعتر، عدم قطعیت کمتری دارد. پس از قطع پیشبینی، گرادیان قرائت توان بررسی میشود و اگر افزایش توانی بیش از یک آستانه تعریف شده آشکارسازی شود، پیشبینی دوباره فعال میگردد.
حساسیت و نویز
حساسیت ترموپیل با تعداد ترموکوپلها تعیین میشود. معادله زیر این رابطه را نشان میدهد:
$$Rv=\frac{\eta n\alpha}{G\sqrt{1+\omega^2+\tau^2}}$$
که در آن \(\eta\) تابش، \(n\) تعداد ترموکوپلها، \(\alpha\) ضریب سیبک، \(G\) رسانش گرمایی، \(\omega\) فرکانس زاویهای و \(\tau\) ثابت زمانی گرمایی است.
نویز غالب در آشکارساز ترموپیل، نویز گرمایی است که نویز جانسون در مقاومت المان نامیده میشود. میزان این نویز برابر است با:
$$V_N=\sqrt{4k\: T\: R_d\: \Delta f}$$
که \(k\) ثابت بولتزمن، \(T\) قدرمطلق دما، \(R_d\) مقاومت المان و \(\Delta f\) پهنای باند میباشد.
محفاظت سنسورهای حرارتی از اختلالات حرارتی
برای دستیابی به نتایج دقیقتر، حسگرهای حرارتی باید از جریان هوا و سایر اختلالات حرارتی در طول عملیات محافظت شوند. درغیر اینصورت، اندازهگیریها خطا خواهندداشت. این موضوع برای حسگرهای توان کم با تفکیک پذیری بالا، اهمیت زیادی دارد. بکارگیری تکنیکهای دستی برای هیچ یک از حسگرهای حرارتی توصیه نمیشود، زیرا گرمای بدن با انتقال به حسگر یا خنککننده میتواند دقت اندازهگیریها را تحت تاثیر قرار دهد
همانطور که اشاره شد، حسگرهای حرارتی توان با اندازهگیری اختلاف درجه حرارتی کار میکنند، که به سیگنال ولتاژ تبدیل میشود. در طراحی حسگر فرض میشود که گرمای تولید شده در جاذب به سمت خنک کننده جریان مییابد. اگر اپراتور در حین عملیات در تماس با محفظه حسگر باشد، حرارت بدن ممکن است به حسگر منتقل شود و تاثیرگذاریهای اشتباهی را برای اندازهگیری توان داشته باشد. بهعنوان مثال، اگر حسگر ازطریق خنککننده نگه داشته شود، حرارت انتقال یافته از دست به خنککننده به سمت جاذب، جریان میگیرد. بنابراین اگر هیچ نوری بر روی جاذب فرونیاید، این منجر به خواندن توان منفی و اگر نوری به جاذب برسد، توان ناصحیحی قرائت خواهد شد.